







OCamCalib: Omnidirectional Camera Calibration Toolbox for Matlab
本文主要目的是为分享来自苏黎世大学Davide Scaramuzza的OCamCalib全视角相机模型标定矫正算法。作者主页 因为是被墙了,所以我分享出来以供参考。先上结果图:


可以看出,效果是相当不错的,所以这也是我强烈分享给大家的原因之一。
环境
1. MATLAB2015R标定鱼眼镜头
2. Ubuntu14.04 + OpenCV2.4.11根据标定结果对鱼眼镜头矫正
资源
1. C++鱼眼矫正程序
预备工作
1. 将OCamCalib工具箱添加到Matlab里面,这个方法如果不懂,百度挺多的,这里就不赘述了。
2. 在使用前跟一般的相机矫正方法类似,先拍大约二十张棋盘格,注意每张图必须要拍满所有的角点!一般的原则是,尽可能让每个区域都有棋盘格分布。
3. 将拍好的照片放到工具箱对应的目录下(这里也可以不用如此,只是本人习惯而已)
具体操作步骤
将拍摄好的棋盘格照片放到OCamCalib工具箱目录下
将上述链接地址的工具箱下载本地添加到Matlab工具箱地址,然后运行ocam_calib。
加载图片,选择Read names
Basename camera calibration images (without number nor suffix):
输入你照片的共同的前缀部分Image format: ([]='r'='ras', 'b'='bmp', 't'='tif', 'g'='gif', 'p'='pgm', 'j'='jpg', 'm'='ppm') >> g
输入你格式对应的字母,然后就加载好图片了。
Loading image 1...2...3...4...5...6...7...8...9...10...done
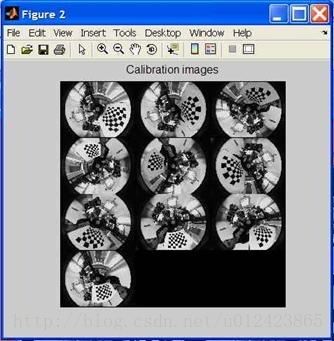
然后,会显示总共加载到的所有图片
接下来Extract grid cornes,提取角点。根据提示,依次需要确认需要添加的图片、棋盘格长宽格子数目、格子的长宽尺寸等,这些相信大家看提示应该知道怎么做。
有需要注意的是,这里输入棋盘格x和y方向的小格子数量,这里的计数是从角点以内的方块开始算的。
Number of squares along the X direction ([]=10) =
Number of squares along the Y direction ([]=10) =
看下图,举个栗子:
上图就是X方向五个方块,Y方向7个方块,这里千万不能弄错,如果弄错了,棋盘格就一个都检测不出来。输入棋盘格的实际尺寸,单位是毫米(mm)
Size dX of each square along the X direction ([]=30mm) = 30
Size dY of each square along the X direction ([]=30mm) = 30剩下的就是确认中心点等,初阶用户按Entry即可。
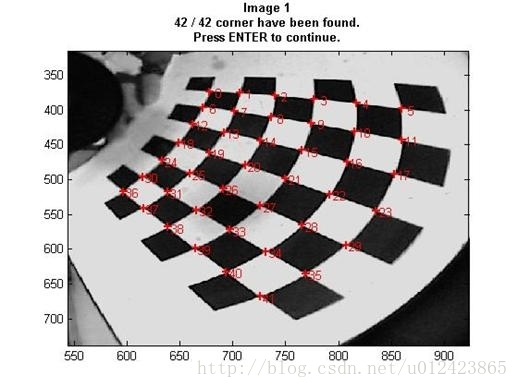
- 下面是正确检测到角点的结果展示
矫正 Calibration ,因为是自动检测角点,所以这里就只要简单的等待即可。
其他的优化结果、显示棋盘格位置、分析误差等功能大家可以尝试,这里我们最重要的是保存标定结果。也就是Save,会在本地生成一个calib_results_fisheye.txt的文件,这就是我们接下来的矫正程序需要用到的。
将calib_results_fisheye.txt文件拷到undistortFunctions的根目录,然后将你的原始图片也拷到根目录,编译运行即可。原工程没有项目文件,仅有简单的几个cpp、hpp文件,推荐大家用qmake生成一个简单的pro文件即可,需要添加OpenCV的几个库,我用OpenCV2.4.11有效运行。
以下是我添加的库列表,节约时间就没有一一去查看是否多余了。
LIBS += /usr/local/lib/libopencv_highgui.so \
/usr/local/lib/libopencv_core.so \
/usr/local/lib/libopencv_imgproc.so \
/usr/local/lib/libopencv_features2d.so \
/usr/local/lib/libopencv_nonfree.so \
/usr/local/lib/libopencv_calib3d.so \
/usr/local/lib/libopencv_video.so \
其它
高阶用法就是优化角点误差、人工选取角点等操作,大家有兴趣自己探索,也可以留言讨论。
因为下载页必须设分数,如果没有下载分的可以留言邮箱,我发给你。
本文摘自OCamCalib: Omnidirectional Camera Calibration Toolbox for Matlab,全视相机模型(暂且这样翻译),这不同于一般的径向畸变模型,这种能够对鱼眼大角度相机做更好的还原,之后有时间跟大家探讨下粗浅的内部机理。
PS
1. 觉得本文有帮助的可以左上角点赞,或者留言互动。














 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









